Kontrol motor servo dengan PWM + keypad
- Memenuhi tugas Mikroprosesor dan Mikrokontroler
- Mempelajari Kontrol motor servo dengan PWM + keypad
- Mengetahui prinsip kerja dari motor servo dengan PWM + keypad
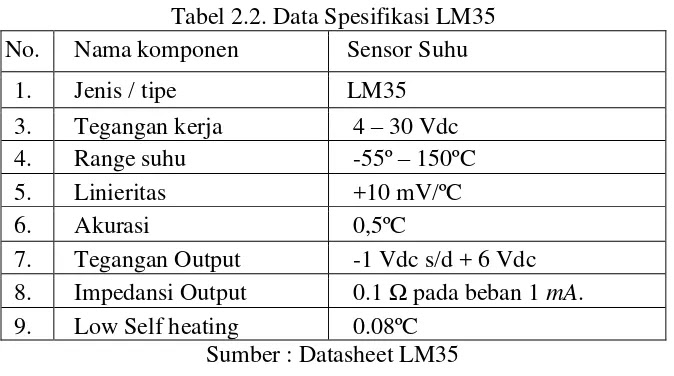
- Menjelaskan prinsip kerja Sensor Heart beat, sensor Touch dan sensor suhu.
- Mensimulasikan rangkaian Sensor Heart beat, sensor Touch dan sensor suhu.


.png)

- 12 tombol (dengan fungsi tergantung pada aplikasi).
- Konfigurasi 4 baris (input scanning) dan 3 kolom (output scanning).
- Kompatibel penuh dengan DT-51 Low Cost Series dan DT-AVR Low Cost Series. Mendukung DT-51 Minimum Systemver 3.0, DT-51 PetraFuz, DT-BASIC Series, dan sistem lain.
- Dilengkapi dengan contoh program.
- Dimensi : 9 cm (P) x 5,4 cm (L) x 1,8 cm (T)
- Perlengkapan : 1 buah DT-I/O 3 x 4 Keypad Module
.jpeg)
.jpeg)
6). Motor Servo PWM

7). Resistor Spesifikasi :
Spesifikasi :





1. Arduino Uno
.png)
Kontruksi

Arduino adalah platform perangkat keras (hardware) yang dirancang untuk memudahkan pengembangan dan prototyping proyek-proyek elektronik. Ini terdiri dari papan sirkuit cetak berukuran kecil yang dilengkapi dengan mikrokontroler dan sejumlah pin input/output yang dapat digunakan untuk menghubungkan sensor, aktuator, dan komponen elektronik lainnya.
Mikrokontroler pada papan Arduino adalah otak utama yang mengontrol berbagai komponen yang terhubung dengannya. Papan Arduino biasanya dilengkapi dengan berbagai macam varian mikrokontroler dari berbagai produsen, seperti ATmega yang diproduksi oleh Microchip Technology. Meskipun demikian, Arduino lebih sering dikaitkan dengan platform open-source yang dikelola oleh Arduino.cc.
Arduino memiliki beberapa komponen utama yang membentuk papan sirkuit mikrokontroler. Berikut adalah penjelasan tentang komponen-komponen utama Arduino:
- Mikrokontroler: Ini adalah otak utama dari Arduino yang melakukan semua operasi pengolahan data dan kontrol. Arduino menggunakan mikrokontroler sebagai pusat kendali, yang berfungsi untuk membaca input, menjalankan kode program, dan mengontrol output. Beberapa varian Arduino menggunakan mikrokontroler dari berbagai produsen, seperti ATmega yang diproduksi oleh Microchip Technology.
- Pin I/O: Arduino memiliki sejumlah pin input/output (I/O) yang digunakan untuk menghubungkan sensor, aktuator, dan komponen lainnya. Pin ini bisa berfungsi sebagai input untuk membaca data dari sensor atau output untuk mengontrol aktuator. Ada pin digital dan pin analog. Pin digital dapat berupa input atau output dengan nilai logika 0 (LOW) atau 1 (HIGH), sementara pin analog digunakan untuk membaca nilai analog seperti sensor suhu atau cahaya.
- Papan Sirkuit: Papan Arduino adalah substrat fisik tempat semua komponen terhubung. Papan ini biasanya terbuat dari bahan tahan lama dan dilengkapi dengan jalur tembaga yang menghubungkan komponen-komponen elektronik.
- Konektor USB: Banyak varian Arduino dilengkapi dengan konektor USB. Ini memungkinkan Anda untuk menghubungkan papan Arduino ke komputer, sehingga Anda dapat mengunggah kode program ke mikrokontroler dan berkomunikasi dengan papan melalui koneksi serial.
- Catu Daya: Arduino memerlukan catu daya untuk beroperasi. Ini bisa berasal dari komputer melalui kabel USB atau dari sumber daya eksternal seperti baterai atau adaptor listrik. Beberapa papan Arduino memiliki regulator tegangan yang memungkinkan papan menerima berbagai tingkat tegangan masukan.
- Konektor Listrik: Arduino umumnya memiliki pin header atau konektor yang memungkinkan Anda untuk menghubungkan kabel atau kawat ke pin I/O. Ini memudahkan Anda dalam menghubungkan sensor, aktuator, dan komponen lainnya ke papan Arduino.
- Kristal Osilator: Kristal osilator digunakan untuk menghasilkan sinyal osilasi yang diperlukan oleh mikrokontroler untuk menjalankan perhitungan waktu dan operasi lainnya.
- Tombol Reset: Tombol reset memungkinkan Anda untuk mengulang proses booting papan Arduino atau menghentikan eksekusi program yang sedang berjalan.
- Indikator LED: Beberapa varian Arduino memiliki indikator LED yang terhubung ke pin tertentu. LED ini dapat diatur dalam kode program untuk memberi tahu status atau kondisi papan, seperti aktif atau dalam mode tidur.
Semua komponen ini bekerja bersama-sama untuk menciptakan platform Arduino yang kuat dan serbaguna untuk mengembangkan berbagai proyek elektronik dan pemrograman.
2. Keypad
Modul keypad 3x4 merupakan suatu modul keypad berukuran 3 kolom x 4 baris. Modul ini dapat difungsikan sebagai input dalam aplikasi seperti pengaman digital, absensi, pengendali kecepatan motor, robotik, dan sebagainya. Penggunaan keypad dilakukan dengan cara menjadikan tiga buah kolom sebagai output scanning dan empat buah baris sebagai input scanning.

Cara kerja rangkaian Keypad 3x4:
- Apabila Kolom 1 diberi logika ‘0’, kolom kedua dan kolom ketiga diberi logika ‘1’ maka program akan mengecek tombol 1, 4, 7, dan *, sehingga apabila salah satu baris berlogika '0' maka ada tombol yang ditekan.
- Apabila Kolom 2 diberi logika ‘0’, kolom pertama dan kolom ketiga diberi logika ‘1’ maka program akan mengecek tombol 2, 5, 8, dan 0, sehingga apabila salah satu baris berlogika '0' maka ada tombol yang ditekan.
- Apabila Kolom 3 diberi logika ‘0’, kolom pertama dan kolom kedua diberi logika ‘1’ maka program akan mengecek tombol 3, 6, 9, dan #, sehingga apabila salah satu baris berlogika '0' maka ada tombol yang ditekan.
- Kemudian kembali ke semula, artinya program looping terus mendeteksi data kolom dan data baris, cara ini disebut scaning atau penyapuan keypad untuk mendapatkan saklar mana yang ditekan. (blog dari Furinkazen)






Grafik Respon Sensor Suhu Lm35

Resistor merupakan komponen elektronika dasar yang digunakan untuk membatasi jumlah arus yang mengalir dalam satu rangkaian.Sesuai dengan namanya, resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Resistor memiliki simbol seperti gambar dibawah ini :

Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan Hukum OHM :



Seri : Rtotal = R1 + R2 + R3 + ….. + Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n
Paralel: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
Dimana :
Rtotal = Total Nilai Resistor
R1 = Resistor ke-1
R2 = Resistor ke-2
R3 = Resistor ke-3
Rn = Resistor ke-n

Rumus dari Transitor adalah :
hFE = iC/iB
dimana, iC = perubahan arus kolektor
iB = perubahan arus basis
hFE = arus yang dicapai
Karakteristik Input
Transistor adalah komponen aktif yang menggunakan aliran electron sebagai prinsip kerjanya didalam bahan. Sebuah transistor memiliki tiga daerah doped yaitu daerah emitter, daerah basis dan daerah disebut kolektor. Transistor ada dua jenis yaitu NPN dan PNP. Transistor memiliki dua sambungan: satu antara emitter dan basis, dan yang lain antara kolektor dan basis. Karena itu, sebuah transistor seperti dua buah dioda yang saling bertolak belakang yaitu dioda emitter-basis, atau disingkat dengan emitter dioda dan dioda kolektor-basis, atau disingkat dengan dioda kolektor.
Bagian emitter-basis dari transistor merupakan dioda, maka apabila dioda emitter-basis dibias maju maka kita mengharapkan akan melihat grafik arus terhadap tegangan dioda biasa. Saat tegangan dioda emitter-basis lebih kecil dari potensial barriernya, maka arus basis (Ib) akan kecil. Ketika tegangan dioda melebihi potensial barriernya, arus basis (Ib) akan naik secara cepat.
Pemberian bias Ada beberapa macam rangkaian pemberian bias, yaitu: 1. Fixed bias yaitu, arus bias IB didapat dari VCC yang dihubungkan ke kaki B melewati tahanan R seperti gambar 58. Karakteristik Output.
2.Self Bias adalah arus input didapatkan dari pemberian tegangan input VBB seperti gambar 60.
Sebuah transistor memiliki empat daerah operasi yang berbeda yaitu daerah aktif, daerah saturasi, daerah cutoff, dan daerah breakdown. Jika transistor digunakan sebagai penguat, transistor bekerja pada daerah aktif. Jika transistor digunakan pada rangkaian digital, transistor biasanya beroperasi pada daerah saturasi dan cutoff. Daerah breakdown biasanya dihindari karena resiko transistor menjadi hancur terlalu besar.
Gelombang I/O Transistor 
Bagian emitter-basis dari transistor merupakan dioda, maka apabila dioda emitter-basis dibias maju maka kita mengharapkan akan melihat grafik arus terhadap tegangan dioda biasa. Saat tegangan dioda emitter-basis lebih kecil dari potensial barriernya, maka arus basis (Ib) akan kecil. Ketika tegangan dioda melebihi potensial barriernya, arus basis (Ib) akan naik secara cepat.
c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]
d. Flowchart dan Listing Program[Kembali]
f. Download File[Kembali]


No comments:
Post a Comment